
Flexiv and NVIDIA Join Forces in Robotics Simulation

<di
Market Intelligence News & Insights:
North American Robot Orders Hold Steady in Q1 2025 as A3 Launches First-Ever Collaborative Robot Tracking
 Robot orders in North America remained essentially flat in the first quarter of 2025, with companies purchasing 9,064 units valued at $580.7 million, according to new data released by the Association for Advancing Automation (A3). Compared to Q1 2024, this represents a 0.4% increase in units ordered and a 15% rise in order value, signaling continued demand and increased investment in higher-value automation systems.
Robot orders in North America remained essentially flat in the first quarter of 2025, with companies purchasing 9,064 units valued at $580.7 million, according to new data released by the Association for Advancing Automation (A3). Compared to Q1 2024, this represents a 0.4% increase in units ordered and a 15% rise in order value, signaling continued demand and increased investment in higher-value automation systems.
v>
.jpg)
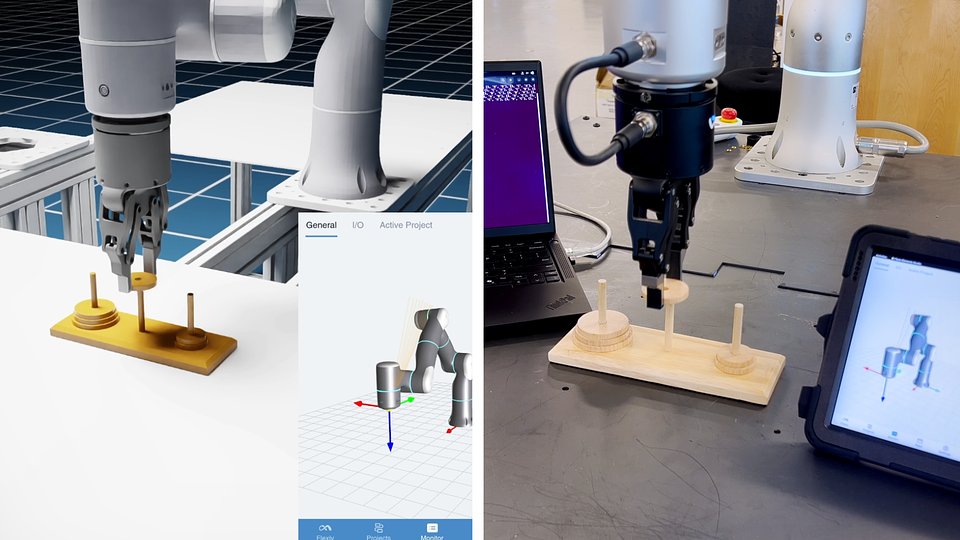
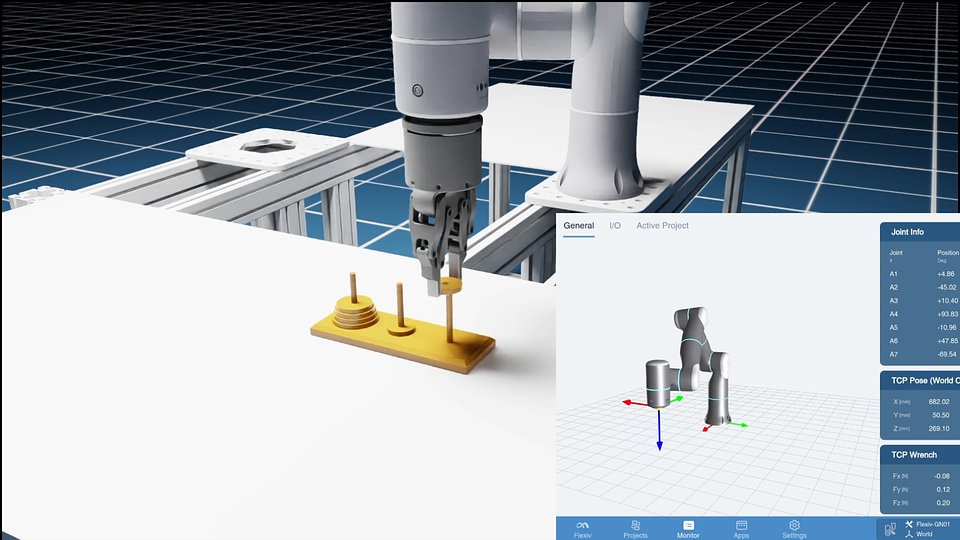
Flexiv launches the Flexiv-Isaac Bridge App, empowering developers to design, test, and deploy force-controlled robotics applications in hyper-realistic virtual environments.
SANTA CLARA, CA, JUNE 16, 2025– Flexiv, a global leader in general-purpose robotics solutions, is pleased to announce the release of the Flexiv-Isaac Bridge App, bringing high-fidelity force-control simulation to NVIDIA's Isaac Sim. This partnership enables robotics developers and end-users to program, model, test, and deploy complex force-controlled, AI-empowered robotics applications in simulated environments that closely mimic contact-rich real-world conditions.




Leave a Reply